
PROJECT DETAILS
Collaborative robotics
With the arrival of 4.0 Industry, the need for technology in the industrial sector has become increasingly demanding, forcing companies and research groups to develop new solutions for it. The necessity of solutions to the problems leads to new ideas and to explore new fields, one of which is the collaborative robotics in which, through the use of different agents, not contemplated solutions are achieved.
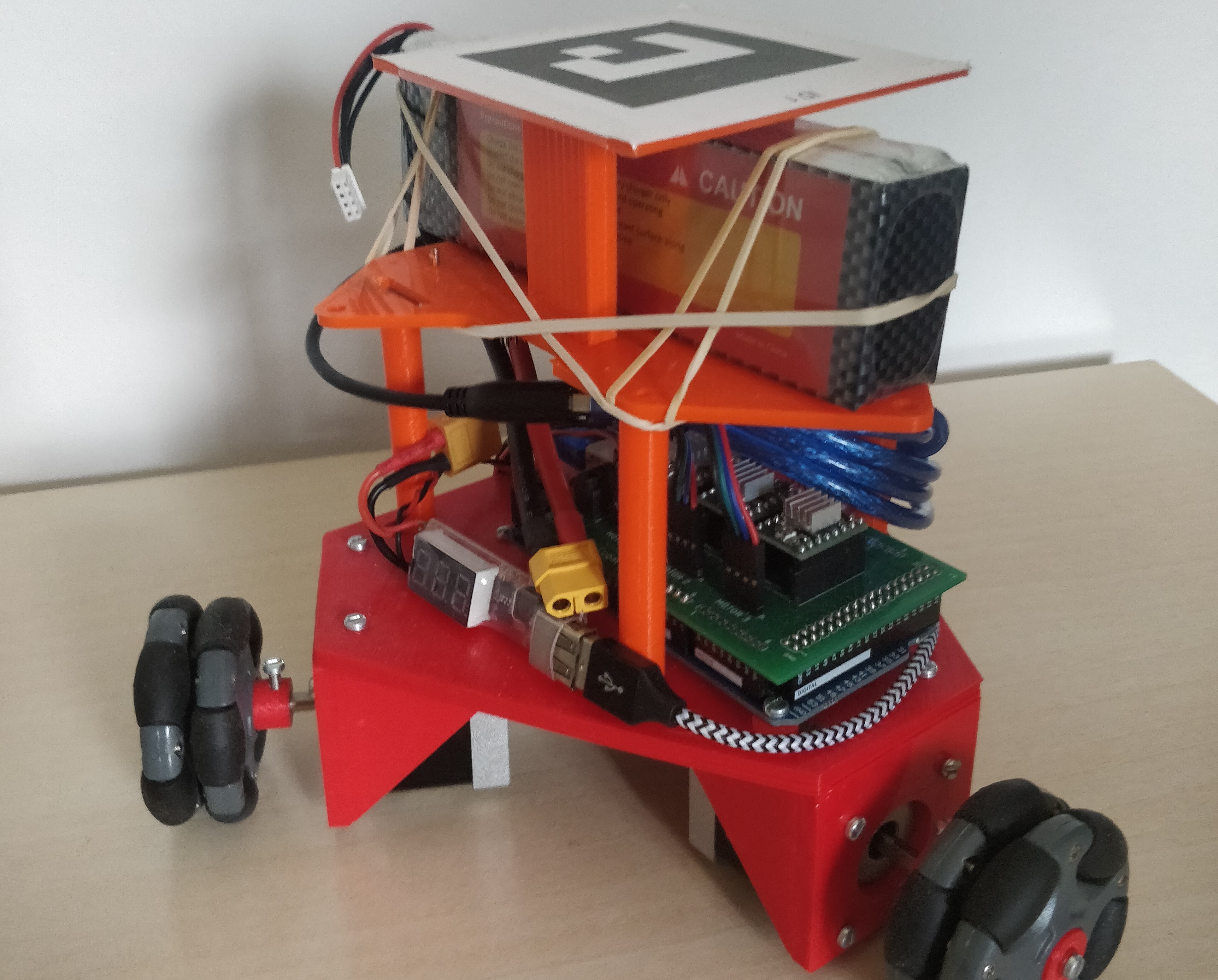
Using CAD tools, additive manufacturing machines and open-source technologies, this work aims to design and implement a system with which to carry out research tasks in the field of collaborative robotics.
The report shows the implementation process followed during the development of the system. This is based on a series of prototypes in which improvements have been applied to obtain a definitive one capable of carrying out the tasks initially proposed.
As a result, the robots of the implemented system are able to move following trajectories and communicate through software designed specifically for this purpose. Thus, the proposed goal is achieved.